
未就学児、小学生、中学生、高校生、大学生、おとなまで、最初はembotコースから始めます。
レベルに応じた対応をします。
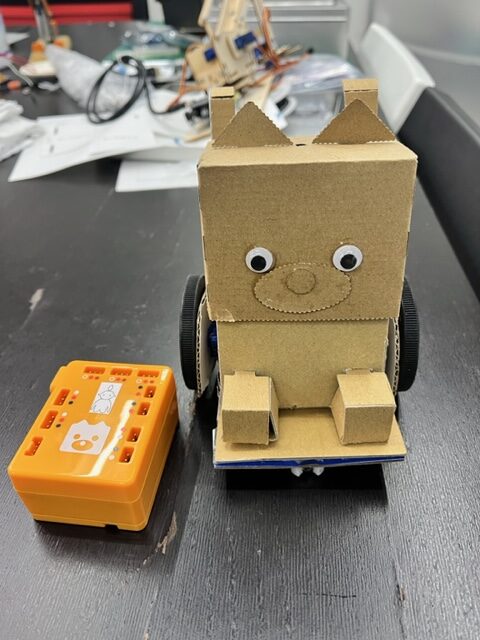
ごらんのとおり、段ボールロボットを最初に作成してもらいます。
みなさんはこれをみて作成できますか?
まずは分解して同じような設計図を作成しないとできませんね。
未就学児、小学校低学年は感性のまま作ってもらいますが、小学校高学年以上はちゃんと設計図を作成するところから始めます。
どんな手で作りますか?
わたしの場合は、100均でトレーシングペーパーを買ってきて同じような設計図を作成しました。
出来上がりはいろいろ思うところがありました。
次はだれでも作れるようにするようにしました。
何が必要ですか?
Windowsならば無料のドローツールがあります。
それを調べてインストールします。
次は、A4の紙と同じようにドローツールで作成します。
ターゲット層はどうしますか?
糊を不要にするとか、いろいろ悩みが出てきます。
さて、実際に段ボールで作成するとなにかうまくいきません。
段ボールは厚みがあるからです。
それが設計図から抜けてました。
再度作り直しです。
というような段ボールロボットを作成するだけでもいろいろな手順があり、安全性とか、万人が作成できるようにするとか、
考えないといけません。
たかが段ボールロボット、されど段ボールロボット。
ちなみに段ボールの厚さはノギスで測りました。
わたしはノギスを操作するというスキルが上がったというわけですね。
本コースの概要
初心者から始めて、次第に高度なプロジェクトを進めていける内容にしています。各月で、基礎的な知識を習得しながら、実際に手を動かして学んでいく形式です。
本コースは全24回です。1回の授業で1レッスンが基本です。
レベル01は、スクラッチベースです。順次や連接処理といわれるプログラミングを習得します。繰り返しや分岐は行いません。
レベル02は、funciton(関数)、繰り返し、分岐を学びます。
レベル03は、角度、位置、時刻、方位のセンサー使え、タブレットの動きに合わせてロボットを動かせます。
レベル04は、変数の追加、設定が行まます。
レベル05は、引数び追加・設定が行えます。
| Lesson | タイトル | 学習目標 | |
| 01 | はじめてのembot | 「embotアプリ(レベル01)」でプログラムを作ろう | ロボット「embot」の仕組みを知ろう |
| 02 | embotを動かそう | 「embotアプリ(レベル02)」でプログラムを作ろう | embotを動かすプログラムを作ろう |
| 03 | ブザーを使おう | 「embotアプリ(レベル02)」でプログラムを作ろう | プログラムの基本処理「順次処理」について学ぼう |
| 04 | LEDライトを使おう | 「embotアプリ(レペル02)」でプログラムを作ろう | プログラムの基本処理「反復処理」について学ぼう |
| 05 | じやんけんロボを作ろう | 「embotアプリ(レベル02)」でプログラムを作ろう | プログラムの基本処理「条件分岐処理」について学ぼう |
| 06 | 時計機能を使おう | 「embotアプリ(レベル03)」でプログラムを作ろう | 時刻を使ったプログラムを作ろう |
| 07 | アラームロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | 変数を使ったプログラムを作ろう |
| 08 | ジャイロセンサーを使おう | 「embotアプリ(レベル04)」でプログラムを作ろう | ジャイロセンサーを使ったプログラムを作ろう |
| 09 | 腹筋カウンターロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | ジャイロセンサーを使ったプログラムを作ろう |
| Lesson | タイトル | 学習目標 | |
| 10 | おみくじロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | らん数を使ったプログラムを作ろう |
| 11 | 温湿度センサー、気圧センサーを使おう | 「embotアプリ(レベル04)」でプログラムを作ろう | Linkingを使ったプログラムを作ろう |
| 12 | 快適環境見守りロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | Linkingを使ったプログラムを作ろう |
| 13 | 明るさチェックロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | Linkingを使ったプログラムを作ろう |
| 14 | 方位磁針ロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | 方位を使ったプログラムを作ろう |
| 15 | ナビロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | 位置センサーを使ったプログラムを作ろう |
| 16 | バランス感覚判定ロボを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | フラグを使ってアプリを作ろう |
| 17 | バランスゲームを作ろう | 「embotアプリ(レベル04)」でプログラムを作ろう | 関数の呼び出しを使ったプログラムを作ろう |
| 18 | パタパタプログラムを作ろう | rembotアプリ(レベル05)」でプログラムを作ろう | 引数を使ったプログラムを作ろう |
| 19 | パタパタゲームを作ろう | 「embotアプリ(レベル05)」でプログラムを作ろう | 引数を使ったプログラムを作ろう |
| Lesson | タイトル | 学習目標 | |
| 20 | 相撲ロボを作ろう① | 「embotアプリ(レベル05)」でプログラムを作ろう | 回転運動を直線運動に変える仕組みを作ろう |
| 21 | 相撲ロボを作ろう② | 「embotアプリ(レペル05)」でプログラムを作ろう | 回転運動を直線運動に変える仕組みを作ろう |
| 22 | オリジナルロボを作ろう① | 習ったことを使って、オリジナルロボを作ろう | 作品の企画・設計をしよう |
| 23 | オリジナルロボを作ろう② | 習ったことを使って、オリジナルロボを作ろう | 作品の制作をしよう |
| 24 | オリジナルロボを作ろう③ | 習ったことを使って、オリジナルロボを作ろう | 作品の発表をしよう |